
Neigungssensor zur Neigungsmessung beliebiger Neigungswinkel über 360 Grad mit RS485-Signalbus


Besonderheiten
- integrierter 16bit Mikrorechner
- busfähiges RS485 Ausgangssignal
- keine Messbereichsgrenzen
- 0,01 Grad Auflösung
- kleine Linearitätsfehler
- hohe Langzeitkonstanz
- hysteresefreies Messsignal
- sehr geringe Nullpunktdrift
- keine Beeinflussung durch elektromagnetische Felder
- erschütterungs- und stoßunempfindlich, da ohne mechanisch bewegte Teile
- hermetisch gekapselt
- Sensor im isolierten Gehäuse galvanisch vom Messort getrennt, dadurch keine Erdschleifen
- durch Klemmring um 360° justierbare Nulllage
- temperaturbedingte Messungenauigkeiten werden durch eine integrierte Temperaturmessung korrigiert
Beschreibung
Der Neigungssensor NG360 ist ein kapazitiv wirkender Flüssigkeitsneigungssensor mit integrierter Sensorelektronik und integriertem Mikrorechner. Das Messergebnis wird über eine RS485 Schnittstelle zur Weiterverarbeitung bereitgestellt. Im Busbetrieb können bis maximal 78 Sensoren an einem Bus betrieben werden.
Das Messprinzip ermöglicht einen systembedingten linearen Zusammenhang zwischen dem zu messenden Neigungswinkel und dem Ausgangssignal. Der ermittelte Messwert ist unabhängig von der Größe der Erdbeschleunigung am Messort, d.h. egal wo man sich befindet, ob in Europa, in Australien, auf dem Mount Everest oder auf dem Mond, der Neigungswinkel wird überall korrekt gemessen. Temperaturbedingte Ungenauigkeiten werden im integrierten Mikrorechner korrigiert.
Anwendung
Die NG360 finden überall dort Anwendung, wo von beliebigen Neigungswinkeln Messwerte gewonnen, über eine logische Schnittstelle vernetzt und mit einem Computer weiterverarbeitet werden sollen. Die Sensoren finden beispielsweise in Bau-, Bergbau- und Landmaschinen, Vermessungsinstrumenten, Flugobjekten, Transport- und Fördergeräten sowie in Schiffen Anwendung.
Technische Daten
| Typ | NG360 |
|---|---|
| Messbereich | 360Grad |
| Auflösung | 0.01Grad |
| Abmessungen | siehe Maßskizze |
| maximaler Gesamtfehler | ±0.25 Grad |
| Querempfindlichkeit | < ±0,1Grad bei 45° Querneigung |
| Einschwingzeitkonstante | ca.0,3 Sekunden |
| Arbeitsspannung UbN | 9V ... 15V |
| Einschaltzeit der Betriebsspannung | < 50ms |
| Stromaufnahme | ca. 30mA |
| Schutzart | IP65 |
| Arbeitstemperatur | -40°C ... +85°C |
| Lagertemperatur | -45°C ... +90°C |
| Gewicht (ohne Befestigungsring oder Kabel) | ca. 141g |
| Elektrischer Anschluss | 2m geschirmtes Kabel Ø4,6mm |
- • Jeder Sensor wird nach Fertigstellung vermessen. Die Lieferung erfolgt mit individuellem Prüfprotokoll, welches genaue Werte für die Mittenspannung und Empfindlichkeit, die statische Kennlinie und die Kennlinie der Linearitätsabweichung enthält.
- • Optional: Kabelkonfektionierung
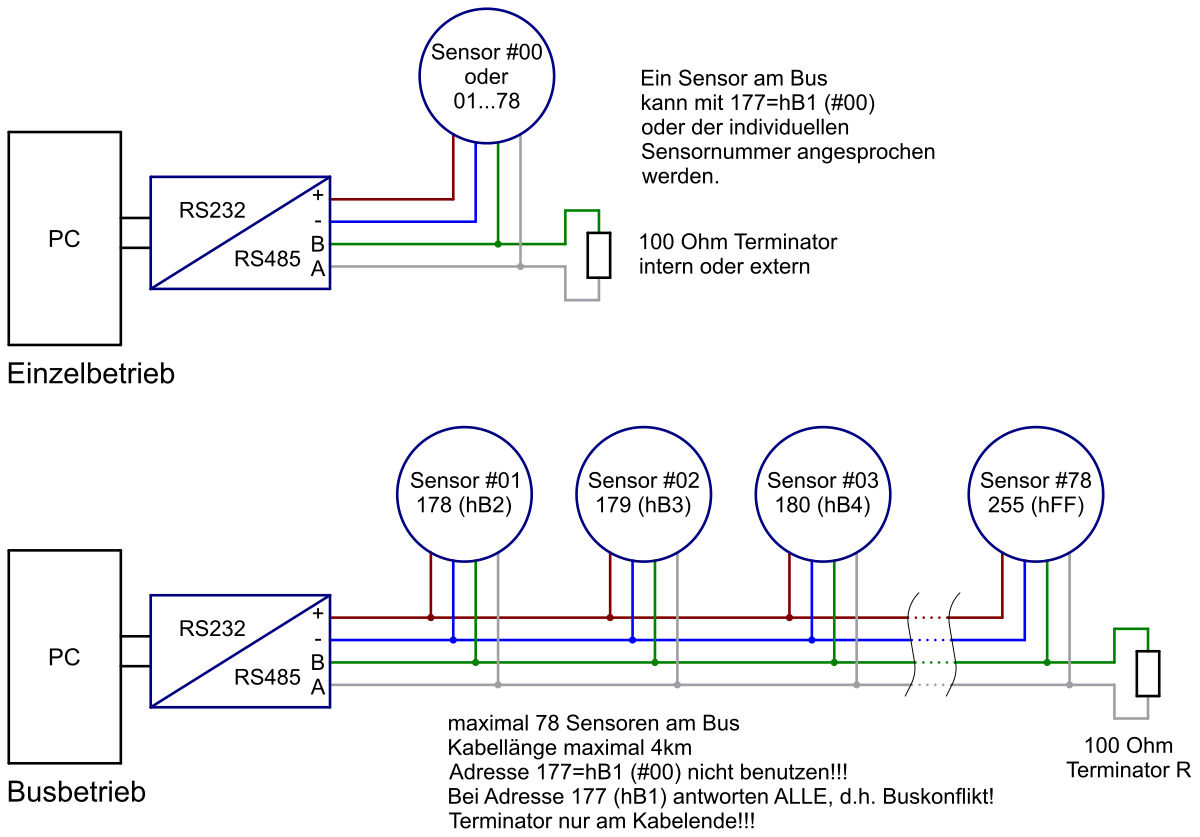
Anschluss von NG360 Sensoren an den RS485 Bus
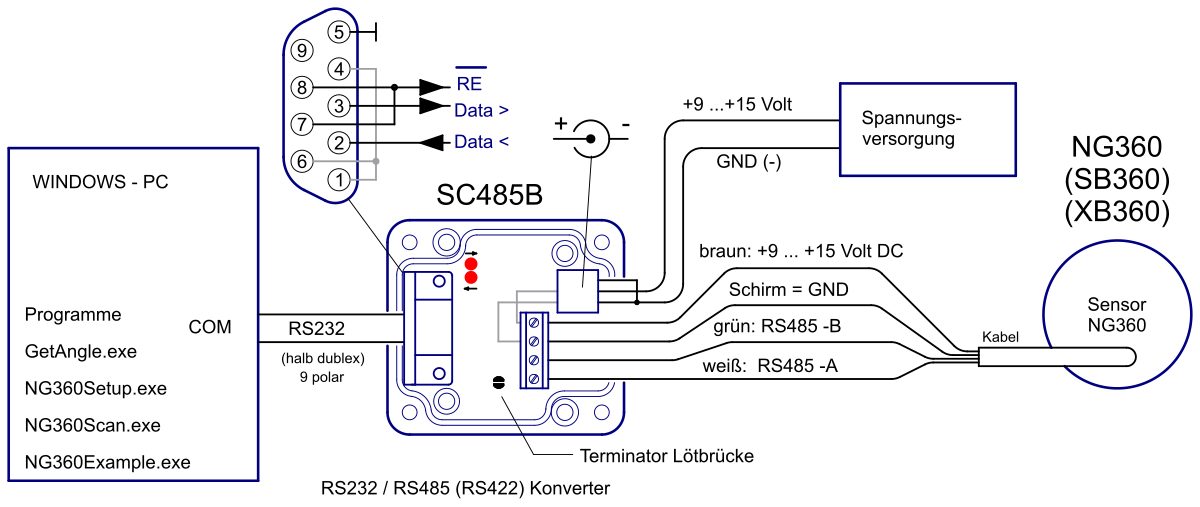
Anschlussbelegung mit SEIKA-RS232/485 Konverter SC485B
Abmessungen (in mm)

Datenübertragungsprotokoll des Neigungswinkels
Winkel können wie folgt von einem angeschlossenen PC empfangen werden:
- Senden: Adresse (1 Byte, B1 bis FF)
- Senden: ENQ (1 Byte, 05)
- etwa 10ms Pause (Sende- Empfangsumschaltung im Sensor)
- Empfangen: STX (1 Byte, 02) + Winkel (6 Bytes ASCII, etwa '359.99') + ETB (1 Byte, 17)
- Empfangen: Checksumme (2 Byte ASCII, etwa '04') + $ (24)
- etwa 10ms Pause (Sende- Empfangsumschaltung im Sensor)
- Senden: wenn Checksumme korrekt: ACK (06), sonst: NAK (15)
- falls ACK: Ende, falls NAK: gehe zu 3
Bildung der Checksumme
Die Checksumme ergibt sich aus der XOR Verknüpfung der unmittelbar vor der Checksumme vom Sensor gesendeten Bytes und wird als Hexadezimalzahl im 2-Byte ASCII Format übertragen. Ein gültiges vom Sensor gesendetes Signal ist etwa:
Sensor: 02 '3' '5' '9' '.' '9' '9' 17 '0' '4' 24
Der Wert der Checksumme 04 berechnet sich hier als:
02 XOR '3' XOR '5' XOR '9' XOR '.' XOR '9' XOR '9' XOR 17
= 02 XOR 33 XOR 35 XOR 39 XOR 2e XOR 39 XOR 39 XOR 17
= 04
Kabelspezifikation PC zu SC485B
Der SC485B RS232/RS485 Schnittstellenkonverter kann direkt an den RS232 Ausgang des PC oder USB zu RS232 Konverters angeschlossen werden. Alternativ kann ein 1:1 bzw. Straight-Through RS232 Kabel verwendet werden um den PC anzuschließen.
Einstellungen der PC-COM-Schnittstelle vor dem RS232/RS485-Konverter
| Bit/Sekunde | 9600 |
| Datenbits | 8 |
| Parität | nein |
| Stopbit | 1 |
| Handshaking | nein |
Software (Windows 95 bis Windows 11)
Zur Messwertanzeige und zur Konfiguration des NG360 stehen die folgenden Programme zur Verfügung. Diese Programme laufen auf jedem
Intel-kompatiblen PC unter Windows 95/98 bis Windows 11. Es ist sinnvoll, die Programme vor der Ausführung auf dem lokalen Rechner
zu speichern. Die Programme sind getestet und funktionstüchtig in Verbindung mit dem SEIKA RS232/RS485 Konverter SC485B.
Die fehlerfreie Funktion der Software mit anderen Konvertern kann nicht garantiert werden - ein Versuch ist möglich.
Obwohl der NG360 an jeder Halb-dublex RS485-Schnittstelle betrieben werden kann, empfehlen wir zur problemlosen Inbetriebnahme
den SEIKA-Schnittstellenkonverter SC485B.
GetAngle GetAngle.exe GetAngle.zip
Dieses Programm zeigt den Winkel eines oder mehrerer NG360, die über einen RS232/RS485-Converter (z.B. SEIKA SC485B) an einen PC angeschlossen sind. Die Schnittstelle COM.., die Sensoradresse und die Darstellungsgeschwindigkeit "display speed" (Mittelung mehrerer Werte) können eingestellt werden. Weiterhin können Messwerte in regelmäßigen Zeitintervallen in ein Logfile, zur Weiterverarbeitung z.B. mit MS Excel, gespeichert werden.
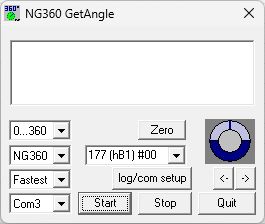
Wenn mehr als ein Sensor am Bus angeschlossen ist, darf die Adresse 177 (hB1) #00 (wie im Bild) nicht verwendet werden.
Da jeder Sensor immer auf die Basisadresse 177 (hB1) reagiert, würden alle Sensoren gleichzeitig antworten, was unweigerlich einen
Buskonflikt hervorrufen würde und keine sinnvollen Informationen gelesen werden könnten.
Ist nur ein Sensor angeschaltet kann die Adresse 177 (hB1) #00 verwendet werden.
NG360Setup NG360Setup.exe NG360Setup.zip
Mit diesem Programm können verschiedene Eigenschaften des NG360 umprogrammiert werden. Die Sensoreigenschaften können ausgelesen,
verändert und dann dauerhaft im EEPROM des NG360 gespeichert werden. Die Einmesswerte bleiben erhalten.
Achtung: wenn für mehrere NG360 an einem Bus die selbe Sensor-Adresse vergeben wird, ist ein Buskonflikt unvermeidbar und
Beschädigungen der Bustreiber-IC möglich! Eine Rückprogrammierung der Adressen ist nur dann möglich, wenn alle bis auf einen
Sensor am Bus ausgeschaltet oder vom Bus getrennt sind. Jeder Sensor antwortet auf die Adresse 177 (hB1), daher sollte kein Sensor auf diese Adresse
programmiert werden. Das Ansprechen eines einzelnen NG360 am Bus mit mehreren aktiven NG360 ist nach Schreiben der Adresse 177
(hB1) zu diesem unmöglich. Da die Basisadresse 177 (hB1) alle Sensoren adressiert würde man die Einstellungen aller Sensoren
überschreiben, insbesondere deren Adressen. Diese müssten danach neu programmiert werden.

In "PC connection settings" sollte zunächst die serielle Schnittstelle und die individuelle Adresse des Sensors
eingestellt werden. Auch hier gilt: Wenn mehr als ein Sensor am Bus angeschlossen ist, darf die Adresse 177 (hB1)
(wie im Bild) nicht verwendet werden.
Selbst lesend würde jeder Sensor auf die Basisadresse 177 (hB1) antworten und einen Buskonflikt herbeiführen.
Sofern nur ein einzelner Sensor am Bus aktiv ist bietet sich die Verwendung der Adresse 177 (hB1) insbesondere dann an,
wenn die Adresse unbekannt oder noch nicht gesetzt ist.
Danach können mit "read variables" die aktuellen Sensoreinstellungen abgefragt werden. Die empfangenen Werte werden in den zugehörigen Felder angezeigt.
Mit "write variables" können die eingestellten Werte in den EEPROM-Speicher des Sensors dauerhaft geschrieben werde. Die Variablen V024, V025, V026 und V063 können aus den Menüs ausgewählt werden.
Die Variable V064 (delay for serial port) bestimmt die Zeitspanne zwischen Empfangen und Senden von Sensordaten. Ein höherer Wert kann hier unter Umständen helfen, eine zuverlässige Datenübertragung für langsame serielle Schnittstellen zu gewährleisten.
Für bestimmte Anwendungen kann die Filterfunktion durch V025 = 0 (no filter) abgeschaltet werden. Bei langsamen Messungen führt ein Filter 2.Ordnung mit niedriger Grenzfrequenz zu einer ruhigeren Messwerteanzeige.
Es kann immer nur ein Programm (GetAngle.exe oder NG360Setup.exe) gleichzeitig auf die serielle Schnittstelle zugreifen, obwohl mehrere Programme gleichzeitig ausgeführt werden können.
Bei Verwendung des oben beschriebenen Datenübertragungsprotokolls können die Sensoren NG360 mit beliebigen anderen Programmen betrieben werden.
NG360Scan NG360Scan.exe NG360Scan.zip
Das Programm kann verwendet werden um festzustellen, welche Sensoren am Bus aktiv sind. Es scannt den NG360 Adressbereich und zeigt den Winkel für jeden verbundenen Sensor an.
Das Programm sendet an alle bei dem NG360 möglichen 78 Adressen eine Anfrage und wartet auf Antwort. Wenn ein Sensor antwortet, wird der
empfangene Winkelmesswert über dem Adressfeld angezeigt. Nach einem erfolgten Scannerlauf kann man sehen, welche Sensoren am Bus aktiv sind.
Mit "Start reading" können anschließend laufend Winkelmesswerte von den aktiven Sensoren abgefragt und dargestellt werden, bis
"Stop reading" betätigt wird.
NG360Example NG360Example.zip
Das Programm NG360Example.exe ist ein mit MS Visuell C++ entwickeltes Musterprogramm, dass es ermöglicht eigene Kommunikationsprogramme für die RS232/RS485-Schnittstelle und die NG360-Sensoren zu entwickeln.
Hardware-RESET
Die NG360-Neigungssensoren werden beim Einschalten der Betriebsspannung durch ein RESET in einen definierten Betriebszustand gesetzt. Dieser Vorgang ist für eine korrekte Funktion des internen Mikrorechners wichtig. Damit der RESET-Vorgang richtig funktioniert soll die Einschaltflanke der Betriebsspannung möglichst kurz sein.
Ein langsames Ansteigen oder kurzes Ein-, Aus- und wieder Einschalten (prellen) der Betriebsspannung kann im sensorinternen Mikrorechner zum Programmabsturz führen. Es entsteht der Eindruck, als ob der Sensor defekt ist und nicht mehr reagiert. Nach einem korrekten Einschalten der Betriebsspannung funktioniert der Sensor wieder normal. Ähnliche Probleme können auftreten, wenn die Betriebsspannung unter 9 Volt absinkt oder unter 9 Volt schwankt.
Bei korrekter Betriebsspannung ist die Betriebsdauer des Sensors unbegrenzt.